Projects

Master's Thesis: Cost efficient tracking for Virtual Production
A C++ and Python implementation of a low-cost IR star tracker running on Raspberry Pi, built and deployed on Linux using CMake. Constructs a ceiling star map from live camera data via OpenCV, then applies 2D/3D geometric matching, optimization algorithms, and pose estimation to achieve robust 6-DoF camera localization in real-world production conditions.
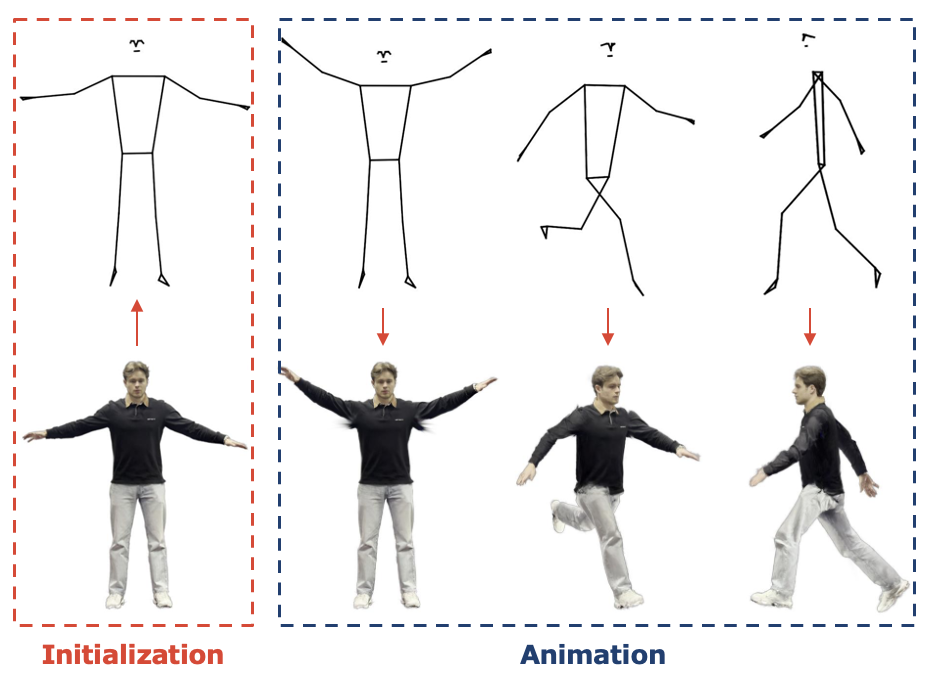
Bachelor's Thesis: Automatic Rigging for Gaussian Splat Avatars
An independent research pipeline in Python for skeleton-driven animation of static 3D Gaussian Splat avatars. Combines MediaPipe pose estimation, 3D geometry alignment, Gaussian-to-bone assignment, forward kinematics, and motion transfer, leveraging PyTorch-based Gaussian Splatting representations without retraining or mesh-based rigging.
ROS2 intelligent robot architecture for TIAGo
A full autonomous robot architecture built in Python on ROS 2, running on Linux with the TIAGo Webots simulator. Integrates a YOLO-based perception stack, LiDAR-driven SLAM for navigation, and a decision-making layer enabling skills like explore, table-clearing, fetch, and goal-directed navigation.
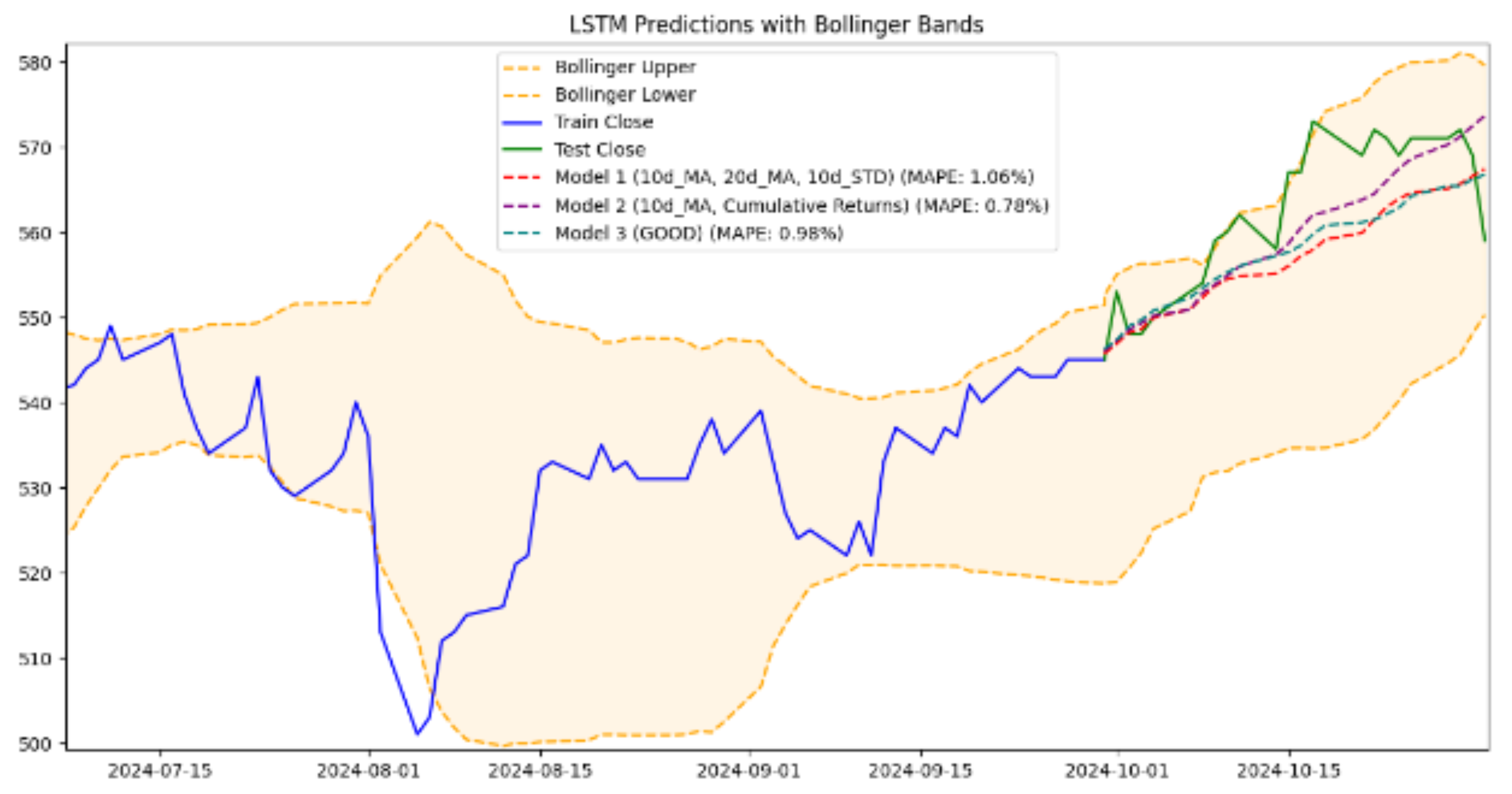
S&P 500 Price Prediction using machine learning
An exploration of regression models and LSTM neural networks, implemented in Python with PyTorch, applied to S&P 500 ETF price prediction. The results are not intended to reflect real market behavior; the goal was hands-on insight into time series forecasting, feature engineering, and the analytical trade-offs between classical regression and deep learning approaches.
Interactive floor with the Kinect V1
An interactive soccer game using Kinect body tracking, applying 3D-to-2D geometric calibration, OpenCV-based foot detection, and gesture recognition to let players control the game through full-body movement.
Frustrated Total Internal Reflection Acrylic Touchpad
A low-cost FTIR multi-touch surface built from CNC-cut acrylic. Uses frustrated total internal reflection to generate touch blobs captured by a webcam, then processed with OpenCV into precise touch coordinates used as system input.